Servus aus Franken,
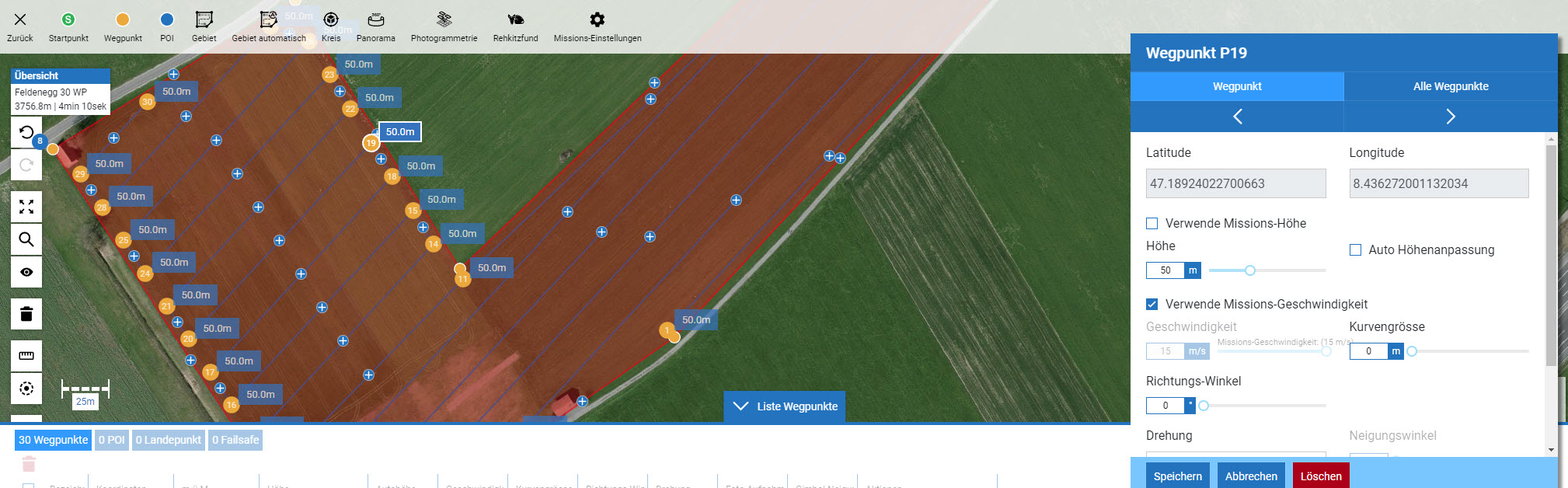
die Wegpunktplanung sieht schon ziehmlich nach Gemüse und wüst aus auf den Bildern, das passiert in der Automatik oft wenn man den falschen Wegpunkt als 1 auswählt.
Erst mal ein paar Verständnis Fragen:
1. Wieso nur 31 Meter Flugbahnanstand, bei deiner Höhe von 65m hast du ein therotisches Sichtfeld von 76m was die Wärmebildkamera abdeckt.
Das heist sie kann links rechts 38m abdecken, von deiner Flugbahn. Das bedeutet sie schaut bei 31m sogar über deine erste Flugbahn hinaus wenn sie die zweite fliegt. Da kostet sehr viel Zeit.
Die M3T hat ein Diagonales Sichtfeld von 61° laut Hersteller, hiermit kann man dann je nach Höhe berechnen was die Wärmebildkamera abdeckt, siehe Link.
https://waermebildkamera-huber.ch/sehfeldrechner/
Aber ich bin ganz ehrlich, wir fliegen auf 70m und Flugbahnabstand von 40m, hier wären es theoretisch 82m, also links rechts 41m was die Kamera abdeckt. Somit könnte ich locker 50m Flugbahnabstand machen und hätte dann in der Mitte der Bahnen noch eine große Überlappung.
Aber ich denke sie schafft nur um die ca. 32-34m also Gesamt 64-68, müsste ich mal genau testen, deswegen bleibe ich bei 40m Flugbahnabstand. Aber zum Feldrand bleibe ich unter 30m.
2. Warum sollen die Läufer mit der Drohne mitlaufen, das kostet doch extrem viel Zeit oder?
Wir fliegen das komplette Feld durch, markieren per GPS Points und schauen uns dann im Zoom und Tiefflug die Sachen alle nochmals an.
Weil wenn wir gleich Läufer hinschicken, sonst z.B. ältere Kitze die abspringen mir auf andere Flugbahnen nochmals reinlaufen und man verliert dann den Überblick was schon war. Natürlich bei so großen Feldern was wir nicht so oft bei uns haben, ist es schwieriger wie man am besten vorgeht.
3. Auf deinen Bild wenn sie von P4 zu P5 fliegt, schaut es so aus als ob der Feldrand weng weit weg ist, ob da noch die 38m langen?
Hier würde ich sogar unter 30m nur machen, damit man nicht so viel schräg ins Feld schaut, wegen Gras über das Kitz, da hat der UAV Editor noch so seine Mängel, gerade bei der letzten Flugbahn die er setzt, geht er von einen Möglichen Abstand aus was als Flugbahnabstand eingestellt ist. Wenn ich wie bei uns 40m einstelle, und die Kamera aber nur 34m schafft ist dies natürlich blöd, da muss man oft nachmessen und gegebenen Falls noch eine Flugbahn manuell zufügen.
Und nun zu deiner Frage mit Startpunkt, setze mal AZ auf Automatik, dann las mal die Wegpunkte generieren, evtl. noch mit Abstand Feldrand von 5-12m spielen, bis die Automatik die Flugbahnen einigermaßen gut gesetzt hat.
So nun musst du schauen das der Wegpunkt der am nähesten an deinen Startpunkt ist, als Wegpunkt 1 ausgewählt wird. Aber nicht einen der in der Mitte irgendwo ist, sondern am besten den letzten oder einen am Feldrand, sonst macht er genau so einen Gemüse wie auf den Bild.
Nun klickst du auf das blaue + zwischen P1 und P2 und ein neuer Wegpunkt mit P2 ensteht. Diesen schiebst du zu P1 und P1 dahin wo du starten willst.
Aber Achtung, der UAV Editor spinnt manchmal, wenn man Wegpunkte erstellt. Sobald du das blaue Plus angeklickt hast geht ja ein Fenster auf, hier bitte alle Werte wie Flughöhe usw. kontrollieren. Am besten alle 4 Hacken bei Verwende Missionhöhe, Geschwindigkeit, Route folgen 2x und Auto Höhenanpassung setzen. Und in den Missioneinstellungen vorher alles fest hinterlegen. Bevor ich Wegpunkte generieren lasse, klicke ich erst auf Missioneinstellungen und prüfe diese, manchmal sind diese verstellt.
Vorteil, man muss wenn der UAV Editor rumzickt nicht alle Wegpunkte kontrollieren, sondern klickt einen an, geht auf alle Wegpunkte und setzt die 4 Hacken, auch wenn schon gesetzt, dann nochmal erst wegklicken und dann neu setzen und alle Wegpunkte bekommen die Werte von der Missionseinstellung.
Wenn du willst schick es mir oder stell das Feld mal als JSON Datei ins Forum, dann schaue ich mir es mal an und plane mal eine Route als Beispiel, mit Video dazu, wie wir es machen und wo man beim UAV Editor drauf achten muss.
Gruß
Matthias