
Mittwoch, 14. Juni 2023
#2994
Mittel / Medium
Ich verwende die Mavic 3T mit Pilot 2. Ich erlebe ein unerwartetes Verhalten während des Imports von UAVE-Flugplänen und ich weiß nicht, ob ich etwas falsch mache oder ob es nur das erwartete Verhalten ist.
Hier ist meine Vorgehensweise:
Jetzt funktioniert alles wie erwartet, ABER das Einzige, was nicht zu funktionieren scheint, ist, dass, wenn ich bestimmte Wegpunkte mit einer höheren Geschwindigkeit gesetzt habe (z. B. vom Startpunkt zum Anfang des Suchgebiets), diese auf die Geschwindigkeit in den Missionseinstellungen am Controller zurückgesetzt wurde.
Abgesehen von diesem letzten Punkt sind die einzigen wirklichen Probleme, dass dies sehr viel Zeit in Anspruch nimmt, vor allem wenn ich 10-15 Felder am Tag fliege, und dass manchmal ein Fehler auf dem Controller erscheint, wenn ich diese Änderungen auf dem kleinen Bildschirm vornehme.
Vielen Dank im Voraus!
Hier ist meine Vorgehensweise:
- Ich exportiere den Flugplan im KML-Format aus UAVE auf den Laptop.
Ich verbinde den RC Pro Controller mit dem Laptop über das USB-C-Kabel.
Ich übertrage die KML-Dateien auf den lokalen Speicher des Controllers.
In Pilot 2 auf dem Controller importiere ich eine KML-Datei.
Der Flugplan erscheint auf dem Controller, ist aber noch nicht nutzbar.
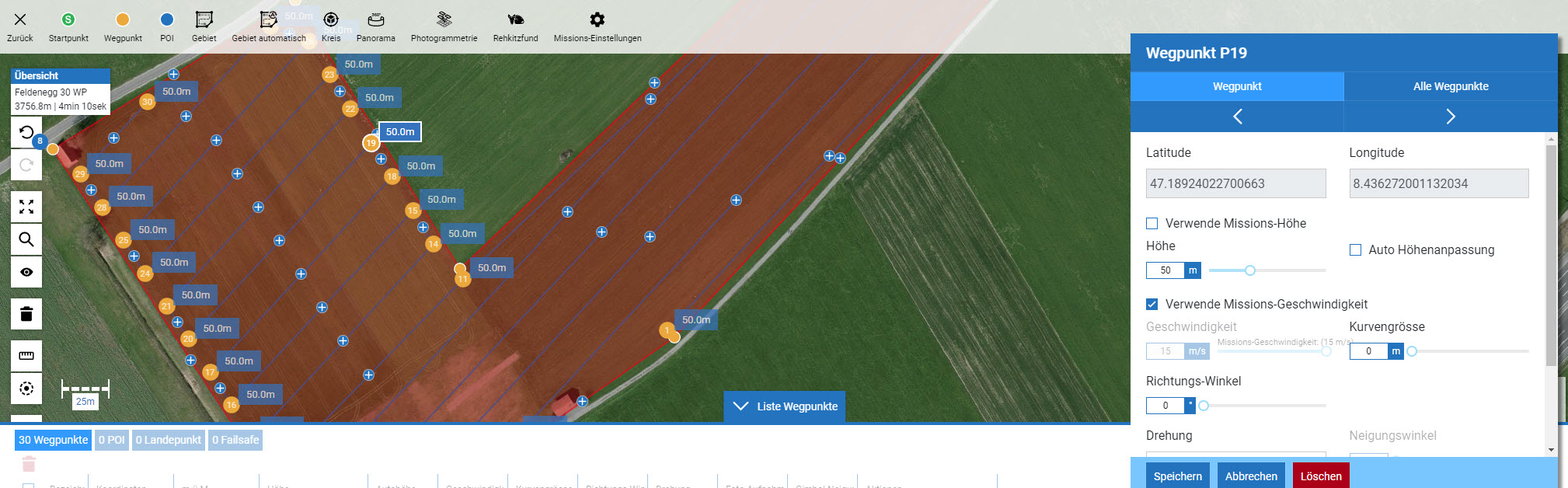
Ich öffne den Flugplan auf dem Controller, bearbeite ihn als "Wegpunktplan" und bekomme die Parameter des Plans angezeigt.
Die falsche Drohne ist ausgewählt, also wähle ich die Mavic 3T aus der Auswahlliste.
Dann überprüfe ich die Missionseinstellungen und sehe, dass die folgenden Einstellungen alle falsch sind: Ausgangshöhe, Fluggeschwindigkeit und Flughöhe.
Ich setze alle diese Einstellungen auf die Einstellungen zurück, die ich in den UAVE-Plan eingegeben hatte, und speichere den Plan dann.
Jetzt funktioniert alles wie erwartet, ABER das Einzige, was nicht zu funktionieren scheint, ist, dass, wenn ich bestimmte Wegpunkte mit einer höheren Geschwindigkeit gesetzt habe (z. B. vom Startpunkt zum Anfang des Suchgebiets), diese auf die Geschwindigkeit in den Missionseinstellungen am Controller zurückgesetzt wurde.
Abgesehen von diesem letzten Punkt sind die einzigen wirklichen Probleme, dass dies sehr viel Zeit in Anspruch nimmt, vor allem wenn ich 10-15 Felder am Tag fliege, und dass manchmal ein Fehler auf dem Controller erscheint, wenn ich diese Änderungen auf dem kleinen Bildschirm vornehme.
Vielen Dank im Voraus!

 Herzlichen Dank!!!
Herzlichen Dank!!! Es gibt noch keine Antworten zu diesem Ticket.
Sei der Erste der antwortet.
Sei der Erste der antwortet.