Helpdesk

Die DJI Pilot 2 Kartierungsfunktion hat nun die Fähigkeit, den notwendigen Flugbahnabstand automatisch zu berechnen, basierend auf den folgenden Punkten:
1. Kamera (und deren Blickwinkel), die für die Mission verwendet wird
2. Höhe über Grund für den Einsatz
3. Gewünschter Prozentsatz der Überlappung
Dies macht die Erstellung von optimalen Flugplänen extrem einfach.
Werden wir diese Funktion möglicherweise im UAV-Editor sehen?
Vielen Dank und Liebe Grüße!

Die Abdeckungsleistung der Drohne lässt sich ziemlich einfach berechnen und in der Praxis werden nur ein paar wenige unterschiedliche Höhen verwendet. Somit muss die Abdeckungsleistung pro Höhenstufe nur einmal berechnet oder noch einfacher, von den Pilotenkollegen welche die gleiche Drohne/Kamera haben übernommen werden. Daher hat dies nicht wirklich Prio bei uns. Nichtsdestotrotz sehe ich, dass sich gerade unerfahrene Drohnenpiloten teilweise schwer mit der Abdeckungsleistung tun bzw. immer wieder Fragen auftauchen und es für sie eine Hilfe wäre. Deshalb habe ich es schon vor einiger Zeit mal aufgenommen und werde es sicher mal nachverfolgen.
Viele Grüsse
Mario
Natürlich habe ich die Flugbahnbreite mit meinem Wissen über den Blickwinkel (FOV) der gewünschten Kamera und die bevorzugten Flughöhen berechnet. Aber ich habe noch kein volles Vertrauen in die Funktion "Gebiet automatisch", um darauf zu vertrauen, dass der gewählte Flugbahnabstand bzw. der Abstand vom Feldrand mir die vollständige Feldabdeckung geben.
Vielleicht kann ich dir meine Vorgehensweise zeigen und du bist so nett, mir zu sagen, ob ich den UAV Editor richtig benutze oder nicht.
DJI Mavic 3T, mit Wärmebildkamera: FOV 61°
Bei Flughöhe 40m sollten ca. 45m Bodenbreite sichtbar sein.
Ich habe den Flugbahnabstand auf 45m und den Abstand vom Feldrand auf 23 (etwa die Hälfte der sichtbaren Bodenbreite) eingestellt.
Sollte dies einen Flugplan erzeugen, die den gesamten gewünschten Bereich des vorgesehenen Feldes abdeckt?
Servus,
Edward
Herzlichen Dank!
Ich gebe keine generelle Empfehlung wegen den Flugbahnbreiten ab, diese sind einfach ein Anhaltspunkt, schlussendlich spielen auch andere Einflüsse und Gegebenheiten sowie die persönlichen Präferenzen ein Rolle.
Viele Grüsse
Mario
Ich bin auch 30+ Jahren im SW/HW-Kundendienst Bereich tätig und verstehe, dass du Kunden nicht "beraten" darfst (sonst gibt's keine Zeit für echte Probleme!)
Das Problem, das wir erfahren ist, dass die Flugbahnen (aus der Gebiet automatisch Funktion) scheinen nicht den Abstand vom Feldrand gemäß FOV zu behalten. Wenn ich z.B. 45m Flugbahn Abstand einstelle, würde ich erwarten, dass das App automatisch rechnet, die Hälfte davon parallel des Feldrandes zu fliegen. Auch deckt der Flugplan das gesamte Gebiet nicht ab. In der Anlage siehe bitte drei Beispiele. Kleingebietbreite ist meistens unter 40m, und Flugbahnabstand ist auf 45m eingestellt. Einmal habe ich Feldrand auf 5 eingestellt, einmal auf 0.
1. Warum läuft der Plan nicht einfach in der Mitte des Feldes entlang? (Fliegt tatsächlich zwischen Punkt 1 und 2 über die Bäume, außerhalb des abgegrenzten Gebietes)
2. Warum fliegt sie nicht in der unteren rechten Ecke hinein? Bei einem FOV (daher einen Flugbahnabstand) von ca 45m in einer Höhe von 40m deckt die Drohne nur etwa 22,5m von der Mitte der Flugbahn ab, und der am weitesten entfernte Punkt dieser Ecke ist etwa 60m von der Flugbahn entfernt.
Im dritten Screenshot erstellte ich einen Flugplan für ein grosses Feld. Rechts unten ist die Ecke wieder nicht abgedeckt, und das Ende jeder Flugspur liegt direkt am Rand des Feldes, anstatt die Hälfte des Flugbahnabstand zu berücksichtigen. Daher wird die Hälfte des FOV für den Bereich außerhalb der Suchzone verwendet.
Ich möchte nur, dass wir die "Gebiet automatisch" Funktion verlässlich verwenden können. Wenn ich etwas völlig falsch verstehe, dann bitte mich auf Ressourcen verweisen, die du für hilfreich hältst, damit ich mich weiterbilden kann.
Herzlichen Dank,
Edward
Beim kleinen Feld: Versuche mal den Flugbahn Abstand zu ändern. Oder bei solch einem Minifeld einfach kurz 2 Punkte selber setzen? (Das Feld ist gut 35m breit und deine Abdeckung 45m.
 )
)Beim grossen Feld: Das passt ja alles perfekt? Oder was soll da genau anders sein?
Viele Grüsse
Mario
Gerechnet auf 70m gibt es ein Boden-FOV von ca. 81m. Wie im Screenshot zu sehen ist, fliegt die Drohne am Ende eines jeden Streifens am Rand des Feldes entlang... d.h. für 80m+ sehe ich auf einer Seite wo ich suchen will, und auf der anderen Seite 40m des falschen Feldes bzw. Forst.
Ich stelle auch fest, dass die von UAV Editor generierte Flugbahn mehr als 60 m vom Rand des ausgewählten Feldes in der unteren rechten Ecke entfernt war (auf diesem Foto nicht zu sehen). Also habe ich diesen Punkt manuell dorthin gezogen, wo er sein sollte (innerhalb 40m vom Rand), ohne die Abdeckung auf der Innenseite der Route negativ zu beeinflussen.
Im Klartext: UAV Editor berücksichtigt nicht, dass die Drohne, wenn ich einen Flugbahnabstand von (z.B.) 80 m einstelle, die Hälfte dieses Abstands vom Feldrand fliegen sollte, wenn sie parallel dazu fliegt.
Es wird auch eine Einstellung für den Flugrandabstand am Ende jeder Reihe benötigt, da dies aufgrund des kleineren vertikalen FOV eine kleinere Zahl sein wird.
Die Lösung für dein Feld wäre ja einfach, wenn du den Feldrandabstand z. B. auf 25m erhöhst, dann ist die Abbildungsfläche des Nebenfeldes schon deutlich kleiner. Der Hintergrund, weshalb es einen (1) Feldrand Abstand und nicht für jeden Rand eine eigene Einstellung gibt ist ziemlich einfach: Es ist nicht trivial. Bei deinem Feld ist es sehr gut erkennbar: Wie genau möchtest du in einem Algorithmus definieren, welcher Rand (Nord, Ost, Süd, West), der noch einen beliebigen Winkel und eine beliebige Form haben kann, welchen Feldrandabstand haben soll?
Deinen zweiten beschriebenen Fall von unten rechts mit der Kante verstehe ich nur mit Text leider nicht. Könntest du mir einen Screenshot mit einer Markierung schicken, was du meinst? Dann kann ich dir diesen Punkt bestimmt auch beantworten.
Viele Grüsse
Mario
Da ich nichts mehr von dir gehört habe, gehe ich davon aus, dass sich dein Ticket erledigt hat. Falls nicht, darfst du dich jederzeit gerne wieder melden.
Viele Grüsse
Mario
Ich habe mir angewöhnt, den anfänglichen Flugplan von UAVE erstellen zu lassen und ihn dann manuell zu modifizieren, damit er für das Feld geeignet ist.
Vielleicht verstehe ich die Definitionen der Parameter falsch, aber ich verstehe unter "abstand Flugrand" die Breite des Bodens unter der Drohne, die sichtbar ist. Ich verwende eine Mavic 3T (Wärmebild), deren horizontales Sichtfeld 50° beträgt. Das heißt, in 65m Flughöhe sehe ich ein Rechteck von 60m x 42m auf dem Boden. Aus algorithmischer Sicht kann man davon ausgehen, dass die Drohne dieses 60 m x 42 m große Rechteck entlang ihrer Flugroute "streicht". Dies ist mathematisch relativ einfach, wenn man die verwendete Drohne und Kamera kennt.
Ich nutze einen 50m Flugbahnabstand für einige Überlappungen. Nach meiner Logik bedeutet dies, dass die Flugbahnen 50 m voneinander entfernt sein sollten, die Drohne aber nicht mehr als 25 m vom Feldrand entfernt geführt werden sollte. Siehe bitte die Beispiele (A und B) im Anhang. Gelb eingekreist ist zu sehen, wo die Drohne einige Teile des Feldes verfehlen wird. Rot eingekreist sieht man, wo die Drohne fast die Hälfte ihres Rechtecks in einem angrenzenden Feld "verschwendet".
In den beiden anderen Beispielbildern (Vor und Nach) kann man sehen, wie ich einen Flugplan manuell so angepasst habe, dass kein Gebiet überflogen wird und so wenig wie möglich vom angrenzenden Feld überflogen wird. ("Vor" is automatisch vom UAVE generiert worden).
Ich hoffe, dass die Obigen unsere Herausforderung ein wenig besser verdeutlichen.
Nochmal möchte ich mich bei Euch für die App und Unterstützung bedanken... ist wirklich ein riesiger Vorteil!
sollte: "dass kein Teil des Fluggebietes ausgelassen wird und so wenig wie möglich vom angrenzenden Feld überflogen wird"
Danke für deine Präzisierung: Bei Beispiel A hast du aber auch einen Feldrandabstand von 7m definiert, daher sind bei "Rot" die Wegpunkte 7m vom Feldrand entfernt und bei "Gelb" wo du gerne noch einen Wegpunkt hättest, es aber mathematisch nicht möglich ist, weil da die Voraussetzungen für die 7m Feldrandabstand nicht gegeben sind. Die Lösung ist ziemlich einfach: Versuche leicht unterschiedliche Flugbahnabstände oder setze einfach kurz manuell einen Wegpunkt dazwischen, mit dem "Blauen Plus Icon" ist dies in einer Sekunde erledigt.
Viele Grüsse
Mario
Das gehört jetzt nicht zu deinem Problem. Du hattest Erwähnt das Ihr eine Fläche um 13:00 Uhr fliegt.
Wir fliegen immer früh morgens da wenn die Sonne aufgeht wir mit vielen Fehldetektionen zu kämpfen haben durch einige Pflanzen die sich erwärmen, Steine, Maulwurfshügel usw. Auf dem Wärmebild sind dann zu viele "helle punkte" zu sehen die man nicht alle kontrollieren kann.
Hast Du irgendwelche speziellen Einstellungen an der Wärmebild Kamera verändert die es möglich macht auch später am Tag nach Kitzen zu suchen? Vielen Dank.
Viele Grüße
Jörn
Hallo Jörn!
Tut mir Leid, deine Antwort verpasst zu haben und hoffe, dass es dir heuer gut geht. Wir fliegen auch am liebsten in der Früh, und starten normalerweise um 03:30 - 04:00 Uhr. Du hast Recht, dass dies optimal ist. Leider können die Landwirten nicht immer am Vormittag mähen und deshalb müssen wir Felder später suchen, damit die Kitze nicht Stundenlang gesperrt bleiben müssen, insbesondere wenn's warm ist.
In diesem Fall geben wir den Landwirten zu verstehen, dass wir tun werden, was wir können, aber die Gewissheit wird viel geringer sein.
Wir haben keine besonderen Einstellungen, wenn es sonnig/warm ist, außer dass wir viel niedriger und langsamer fliegen (40m statt 55m, bei 3 m/s) und zwischen den verschiedenen Farbmodi umschalten, um verschiedene Perspektiven zu erhalten (normalerweise verwenden wir "Tint", aber ich habe gehört, dass "black hot" in warmen und/oder sonnigen Situationen besser sein kann).
Hallo Edward,
Nochmal zu deinen Erfahrungen bezüglich Flugbahnabstand.
Hast du eine grobe Formel für M3T? Ich bin mir immer unsicher. Im Moment benutzen wir bei 70m 35-43 meter je nach Höhe des Materials was gemäht werden soll. Kannst Du teilen wie Ihr es einstellt?
Vielen Dank
Jörn
Hallo Jörn!
Man hört oft, dass die „Faustregel“ für den Flugbahnabstand die Hälfte der Höhe über Boden sein soll, aber ich halte das für ein wenig übertrieben. Wir fliegen auf 55m und verwenden einen UAV-Editor Flugbahnabstand von 40m, einen Abstand Feldrand von 10m, und eine Geschwindigkeit von 3,5m/s. Wichtig ist, dass Du die Flugroute, die UAV Editor generiert, kontrollierst, um sicherzustellen, dass Deine Flugbahn nicht mehr als 20m vom Feldrand entfernt ist. Eher 19m.
Ein weiterer wichtiger Punkt, den wir aus Erfahrung gelernt haben, ist, dass die Drohne stetig auf die Höhe des nächsten Wegpunktes steigt oder fällt. Das ist in Ordnung, solange die Neigung des Feldes gleichmäßig ist, aber hier in der „Buckligen Welt“ Österreichs ist das selten der Fall. Wenn das Feld z.B. zwischen Wegpunkt A und B ansteigt, bevor es abfällt, dann fliegst Du in der Mitte der Strecke zu nah am Boden. Dies führt dazu, dass die Breite des sichtbaren Bereichs am Boden zu gering ist und Du Teile des Bodens übersehen kannst. Schlimmer noch, Du könntest im Extremfall bei Dunkelheit auf den Boden prallen! Daher solltest Du immer auf das + zwischen zwei Wegpunkten klicken, um zusätzliche Wegpunkte hinzuzufügen, wenn die Steigung fraglich ist oder wenn Du eine lange Strecke zwischen Wegpunkten hast.
Ich hoffe, das hat geholfen. Viel Glück bei der Kitzrettung!
Servus -- Edward
Hallo Edward,
Nochmal zu deinen Erfahrungen bezüglich Flugbahnabstand.
Hast du eine grobe Formel für M3T? Ich bin mir immer unsicher. Im Moment benutzen wir bei 70m 35-43 meter je nach Höhe des Materials was gemäht werden soll. Kannst Du teilen wie Ihr es einstellt?Vielen Dank
Jörn
Jemand in der WhatsApp-Gruppe hat diesen Ratschlag (siehe Anhang) mit den empfohlenen Flugbahnabständen für verschiedene Höhen erstellt. Wie bereits erwähnt, sind diese auf der "konservativen" Seite, aber Du wirst sicherlich nichts verpassen, wenn Du sie benutzt.
Hallo Edward,
Vielen Dank für deine Ausführlichen Beschreibung. Wir fliegen 160km nördlich von Berlin und hier haben wir eher flaches land. Dafür aber im Vergleich riesige Flächen. Wir bekommen oft anfragen für 60ha plus... bis zu 150ha und das ist dann eine Fläche.Das ist natürlich schwer zu leisten im Ehrenamt, daher bin ich immer auf der Suche nach optimirungen. In der Grafik die Du geteilt hast wird mit 40% seitlicher Überlappung geflogen das ist definitiv zu viel meiner Meinung nach aber ein guter Anhaltspunkt. Sieht so aus als ob ich mal testen muss was die Abstände betrifft. meist fliegen wir 60-70m hoch und da muss ich mal sehen ob deine Grafik mir weiterhilft die beste Seitliche Überlappung zu errechnen um 10 bis 20% Überlappung einzustellen.
Euch ebenfalls eine Erfolgreiche Saison in der Kitzrettung.
Viele Grüße
Jörn
Hallo Jörn!
Man hört oft, dass die „Faustregel“ für den Flugbahnabstand die Hälfte der Höhe über Boden sein soll, aber ich halte das für ein wenig übertrieben. Wir fliegen auf 55m und verwenden einen UAV-Editor Flugbahnabstand von 40m, einen Abstand Feldrand von 10m, und eine Geschwindigkeit von 3,5m/s. Wichtig ist, dass Du die Flugroute, die UAV Editor generiert, kontrollierst, um sicherzustellen, dass Deine Flugbahn nicht mehr als 20m vom Feldrand entfernt ist. Eher 19m.
Ein weiterer wichtiger Punkt, den wir aus Erfahrung gelernt haben, ist, dass die Drohne stetig auf die Höhe des nächsten Wegpunktes steigt oder fällt. Das ist in Ordnung, solange die Neigung des Feldes gleichmäßig ist, aber hier in der „Buckligen Welt“ Österreichs ist das selten der Fall. Wenn das Feld z.B. zwischen Wegpunkt A und B ansteigt, bevor es abfällt, dann fliegst Du in der Mitte der Strecke zu nah am Boden. Dies führt dazu, dass die Breite des sichtbaren Bereichs am Boden zu gering ist und Du Teile des Bodens übersehen kannst. Schlimmer noch, Du könntest im Extremfall bei Dunkelheit auf den Boden prallen! Daher solltest Du immer auf das + zwischen zwei Wegpunkten klicken, um zusätzliche Wegpunkte hinzuzufügen, wenn die Steigung fraglich ist oder wenn Du eine lange Strecke zwischen Wegpunkten hast.
Ich hoffe, das hat geholfen. Viel Glück bei der Kitzrettung!
Servus -- Edward
Hallo Jörn,
Ja, das war genau mein Punkt. So viel Überlappung (wie in der Grafik) ist meiner Meinung nach zu viel.
Da wir wissen, dass das HFOV der Wärmebildkamera 50° und das VFOV 36° beträgt, können wir mithilfe einer Dreiecksberechnung mit angemessener Genauigkeit bestimmen, wie viel vom Boden in einer bestimmten Höhe sichtbar ist. Davon ausgehend können wir dann bestimmen, wie viel Überlappung wir verwenden wollen.
Unsere aktuellen Einstellungen, wie oben erwähnt, verwenden eine Überlappung von 29,4 %.
Zuvor flogen wir in 65 Höhenmetern (bei 4 m/s) mit einem Flugbahnabstand von 50 m. Die maximale sichtbare Bodenbreite in dieser Höhe beträgt 60 m (60,6 m, um genau zu sein), so dass wir in diesem Fall eine Überlappung von 17,5 % verwendeten.
Wir hatten guten Erfolg, aber es gab ein paar tragische Fälle, in denen wir ein Rehkitz am Rande unserer Sichtweite möglich verpasst haben. Nach einer langen Diskussion mit Dr. Israel (dem Erfinder des POI-Studios, das wir nicht benutzen, das aber für Euch interessant sein könnte) habe ich beschlossen, es mit einer etwas größeren Überlappung und einer geringeren Höhe zu versuchen. In Anbetracht Eurer geographischen Gegebenheiten könnte ein Flugbahnabstand von 55 m bei 70 Höhenmetern (ca. 15 % Überlappung) jedoch genau richtig sein!
Glück ab, gut Land!
-- Edward
Das Problem wo ich für Neulinge denke ist, dass nicht hauptsächlich die Überlappung das Problem ist, sondern der Abstand der Flugbahn zum Feldrand.
Der UAV Editor neigt dazu die letzte Bahn so einzuzeichnen das sie genauso viel Abstand zum Feldrand hat wie zwischen den Bahnen.
Also im blödesten Fall bei 40m Flugbahnabstand hat die letzte Bahn auch bis zu 40m zum Feldrand, aber das deckt die Wärmebildkamera gerade so ab.
Sie hat z.B. bei 70m höhe und 61° Blickwinkel in der Breite ein Sichtfeld von 82,5 Meter.
Davon die hälfte nach links und rechts wenn sie auf der letzten Flugbahn fliegt, also ca. 41m zum Feldrand, theoretisch lang es, aber praktisch nicht, weil zum einen bei nicht genau rechteckigen Feldern die letzte Flugbahn oft noch mehr Abstand an bestimmten Punkten hat.
Und weil hier einfach zu schräg rein gesehen wird und das Kitz von Gras abgedeckt ist.
Wir machen hier noch eine Zusatzflugbahn rein, bzw. messen mit der Linialfunktion in der Feldplanung bei allen Feldern die Abstände da wo es kritisch sein kann. Insbesndere bei unförmigen Feldern ist die automatische Flugbahn Planung schnell am Limit.
Vorschlag, einfach mal Open AI für eine Zusammenarbeit auf Charity Basis fragen.
Ich habe mal Testweise ChatGPT eine KML Datei hochgeladen und eine Flugbahnen Berechnung durchführen lassen auf Basis Flughöhe und verwendete Drohne, Wow Hammer hat es super gemacht, aber kostet halt Zeit, im UAV Editor integriert wäre eine Idee.
"Wir machen hier noch eine Zusatzflugbahn rein, bzw. messen mit der Linialfunktion in der Feldplanung bei allen Feldern die Abstände da wo es kritisch sein kann. Insbesndere bei unförmigen Feldern ist die automatische Flugbahn Planung schnell am Limit."
Genau auch meine Lösung! Und wenn's wirklich ungeschickt ist, lösche ich einfach alle Wegpunkte und den gesamten Flugplan Punkt für Punkt mit Lineal selber erstellen... 😅
Genau wie wir, mache ich oft das ich bei Kraut und Rüben Feldern gleich die Wegpunkte selbst setze, statt automatisch😂
Und auch oft mal das Dashboard neu lade, gerade bei Wegpunktplaner über Popup.
Hallo zusammen
Könntet ihr mir bitte mal ein paar Beispiele von solchen schwierigen Felder (inkl. den Einstellungen) schicken? Am Besten als JSON, dann kann ich diese sammeln und beim nächsten Update vom Algorithmus einfliessen lassen.👍
So können wir ihn optimieren.
Viele Grüsse
Mario
Jupp sehr gerne. Mache ich die Tage oder morgen mal, aber jetzt ist Betttime, morgen großer Auftrag😃
@Mario, Dateien und Details habe ich per Mail geschickt. Hoffentlich hast du sie erhalten!
Hallo Mario,
ich habe jetzt einfach mal aus 5 Felder aus unseren Einsätzen genommen und dir die Felder per JSON Zip Ordner per mail geschickt.
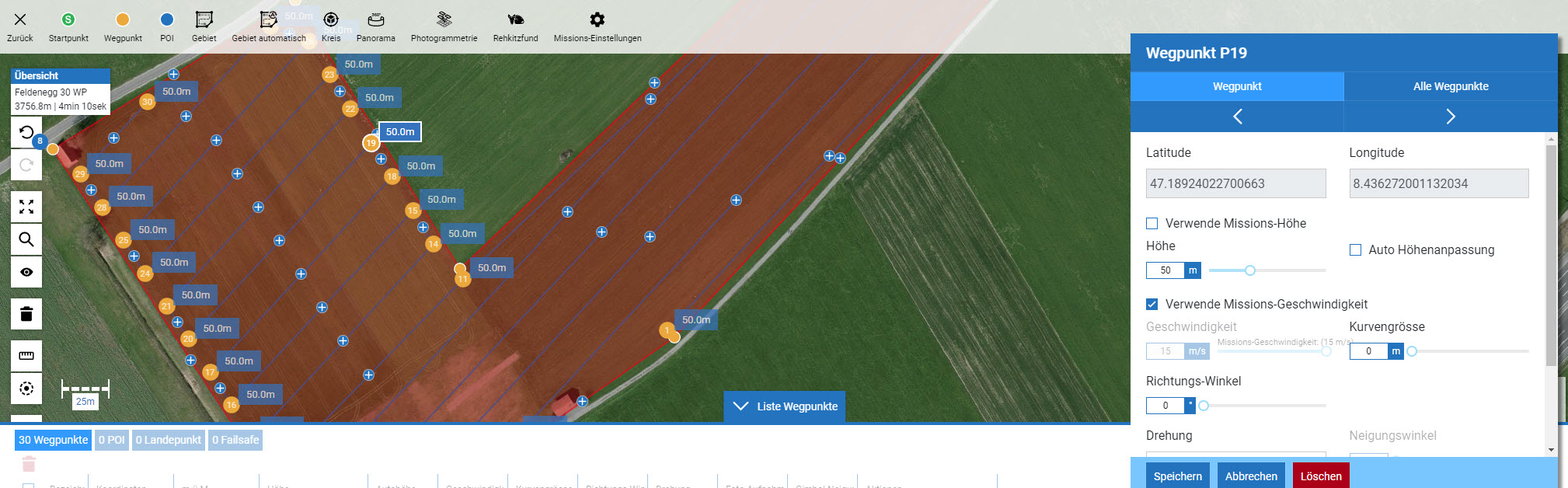
Die Werte für Missions-Einstellung und Gebiet automatisch sind so wie auf den Bildern eingestellt.
Die Flugbahnen wurden wie auf den Bildern automatisch so erstellt,
Hier die Erklärung:
Testfeld 1:
Der Klassiker, hier ein rechteckiges Feld, leider fehlt noch eine Flugbahn links, Feldrand zur letzten Flugbahn über 40m.
Das ist leider viel zu viel, wünschsenswert wäre wenn man bei Abstand Feldrand zwei Werte eingeben könnte.
Einmal für Abstand Flugbahn zum Feldrand, hier würde ich max. 20-25m machen und einmal von den Wegpunkten zum Feldrand.
Weil die Kamera hat ja zwei Blickbreiche einmal nach vorne und einmal seitlich und beide sind unterschiedlich groß.
Testfeld 2:
Zu viel Abstand von Wegpunkt 4-5 nach links in die Ecke, dann 5-6 zuviel zum Feldrand und bei 7-8 wieder zuviel zur Ecke.
Testfeld 3:
Solche Schlangenfelder bei uns heisen die Kraut und Rübben Felder haben wir oft, hier lässt er die obere Ecke komplett aus bei Wegpunkt 2 und die Flugbahn ist nicht mittig im Feld.
Testfeld 4:
Nun ein Kraut und Rübbenfeld mal in groß😅.
Hier lässt er unten das Stück komplett weg, dann zwischen Wegpunkt 8-9 zuviel Abstand zum Feldrand oben.
Und ein wichtiger Punkt der Abstand von Wegpunkt 8 zum Feldrand unten ist auch zu groß auf dem weg zu Punkt 9, hier ziehe ich z.B. den Punkt 11 weiter zu Punkt 8, damit der Feldrand gut abgedeckt ist, bzw. das Feld hätte ich grundsätzlich per Hand gemacht.
Testfeld 5:
Von Punkt 4 zur Ecke rechts fast 60m, ist leider viel zu viel, warum er Punkt 1 hier nicht rechts anfangen läst ist auch komisch.
Das waren jetzt mal 5 so Musterbeispiele, denke es ist gut erkennbar was ich meinte oder?
Für Neulinge schon viele Sachen die sie beachten müssen, wäre schon gut wenn sowas lösbar wäre., wird aber nicht einfach wahrscheinlich.
Gruß
Matthias
Hallo Mario,
bin gerade bei der Planung für Morgen. Hier noch ein richtiger Klassiker, wenn es kein recheckiges aber auch nicht so komplexe Feld ist.
Hier lässt es die Ecken links oben aus und unten den kompletten Bereich, zudem zieht es Wegpunkt 1 nicht nach rechts.
Wenn ich dies anpasse ziehe ich auch gerne Punkt 5 und 6 noch etwas länger, damit sie auf gleicher Höhe wie Punkt 3 und 4 sind, auch wenn es aus dem Feld raus geht, sonst kann es sein das nicht alles abgedeckt wird.
Habe es Dir noch per JSON Datei geschickt.
Gruß
Matthias
Hallo zusammen
Vielen Dank für eure Beispiele, ich werde sie beim Optimieren gerne einfliessen lassen.
Viele Grüsse
Mario
Sei der Erste der antwortet.