Donnerstag, 08. Juni 2023
#2967
Mittel / Medium
Hallo Mario,
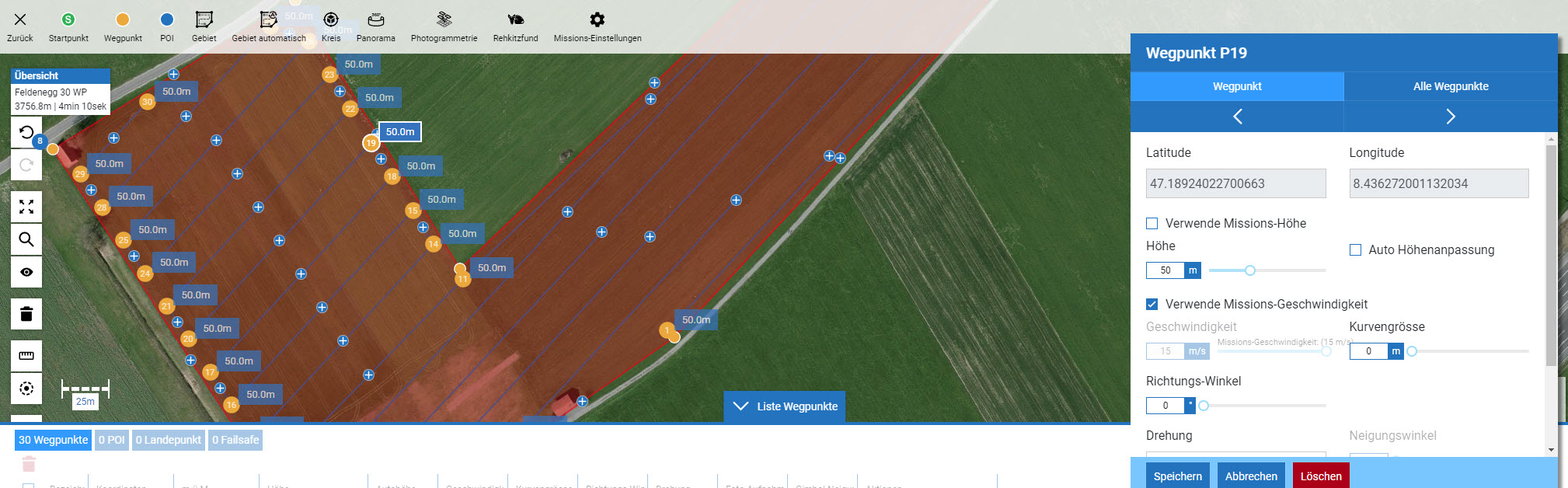
aktuell ist es ja so das die Automatische Höhenanpassung ab Punkt 2 korrigiert. Also von Punkt 1 zu 2 dann von Punkt 1 zu 3 dann von Punkt 1 zu 4 und so weiter. Somit ist es auch wichtig, dass man in der Nähe von Punkt 1 startet.
Wäre es möglich das dies vom tatsächlichen Startpunkt des Kopters möglich wäre? Praktisch das alle Punkte vom Startpunkt aus korrigiert werden.
Da wir oft den Fall aus Zeitgründen haben, dass wir nicht jedes Feld anfahren sondern uns in die Mitte stellen, meistens ist dann nichts im Feld uns spart Zeit. Bei Fund müssen wir dann natürlich hin. Und dann muss ich vorher es schon so programmiert haben, dass Punkt 1 nicht im Feld ist, sondern da wo ich starte.
Oder das einfach jeder Punkt im Feld, zum Boden die Missionshöhe einhält. Also z.B. 70m zum Boden. Das wäre natürlich am besten. Dann ist es völlig egal wo ich starte.
Gruß
Matthias
aktuell ist es ja so das die Automatische Höhenanpassung ab Punkt 2 korrigiert. Also von Punkt 1 zu 2 dann von Punkt 1 zu 3 dann von Punkt 1 zu 4 und so weiter. Somit ist es auch wichtig, dass man in der Nähe von Punkt 1 startet.
Wäre es möglich das dies vom tatsächlichen Startpunkt des Kopters möglich wäre? Praktisch das alle Punkte vom Startpunkt aus korrigiert werden.
Da wir oft den Fall aus Zeitgründen haben, dass wir nicht jedes Feld anfahren sondern uns in die Mitte stellen, meistens ist dann nichts im Feld uns spart Zeit. Bei Fund müssen wir dann natürlich hin. Und dann muss ich vorher es schon so programmiert haben, dass Punkt 1 nicht im Feld ist, sondern da wo ich starte.
Oder das einfach jeder Punkt im Feld, zum Boden die Missionshöhe einhält. Also z.B. 70m zum Boden. Das wäre natürlich am besten. Dann ist es völlig egal wo ich starte.
Gruß
Matthias

Es gibt noch keine Antworten zu diesem Ticket.
Sei der Erste der antwortet.
Sei der Erste der antwortet.